






























نقد و بررسی
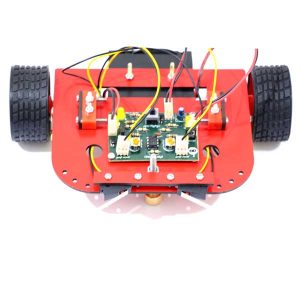
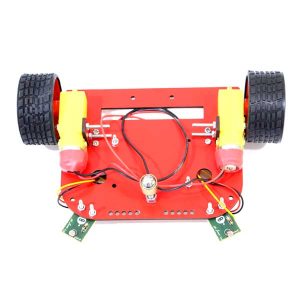
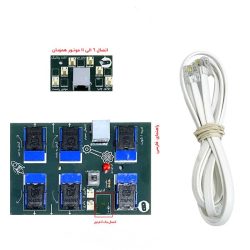
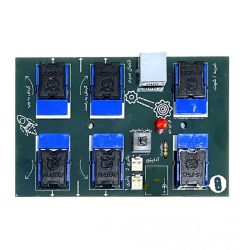
کیت خودرو خودران بدون نیاز به برنامه نویسی | 3 ربات ربات تعقیب خط ، تعقیب نور و حل مازیکی از محصولات جذاب و چند منظوره رباتیک آروند کیت خودرو خودران بدون نیاز به برنامه نویسی است که دانش آموزان رده سنی 8 تا 12 سال با منتاژ قطعات و لحیم کاری این کیت می توانند یک ربات هوشمند سه کاره را خودشان بسازند. ساختن ربات یک سرگرمی مناسب برای رشد فکری دانشآموزان است که همراه با یادگیری اوقات خوشی را برای نوجوانان فراهم میکند. این پکیج دارای قطعات الکترونیکی به منظور آموزش مبانی اولیه الکترونیک کودکان به همراه یک فیبر مدار چاپی یک ربات سه کاره (مسیریاب، نورباب و حل ماز آنالوگ) میابشد.
برای دانلود PDF راهنمای راه اندازی و لحیم کاری خودرو خودران کلیک کنید
- این بسته آموزش الکترونیک برای چه رده سنی مناسب است؟
- برای استفاده از این کیت آموزشی به چه لوازمی نیاز داریم؟
- طراحی و ساخت ربات حل ماز یا دوری از مانع
- ربات حل ماز چگونه عمل میکند ؟
- طراحی و ساخت ربات نوریاب یا دنبال کننده نور
- ربات نوریاب چگونه عمل میکند ؟
- طراحی و ساخت ربات مسیریاب یا دنبال کننده خط
- ربات مسیریاب چگونه عمل میکند ؟
- شناخت و عملکرد سنسورها
 |
 |
 |
 |
 |
 |
اگر پرداخت آنلاین براتون سخته یا رمز پویا ندارین هیچ مشکلی نیست
از طریق روبیکا/شاد/ایتا و تلگرام (8009-277-0935) یا تماس 02191300089 سفارش دهید
این بسته آموزش الکترونیک برای چه رده سنی مناسب است؟
این بسته یک کیت سرگرمی و آموزشی جهت شناخت سه ربات محبوب در بین دانش آموزان است و مخاطبین آن گروه سنی 8 الی 16 سال است. برای استفاده از این کیت به مهارت لحیم کاری و تا حدودی آشنایی با قطعات الکترونیکی نیاز است . کیت سه ربات هوشمند دارای برگه راهنما جهت منتاژ ربات است اما دانش آموز نیز باید دوره های الکترونیک مقدماتی را گذرانده باشد تا بتواند به خوبی از این بسته آموزشی استفاده کند.
پیشنهاد ما گذراندن دوره مقدماتی الکترونیک سطح 2 یا سطح 3 میباشد. دانش آموز باید حداقل دانش مبتدی از مبانی الکترونیک مانند جریان، ولتاژ ، قطعات الکترونیکی ازجمله خازن, مقاومت, الایدی و … داشته باشد. هم چنین طریقه استفاده از ابزار منتاژ و لحیم کاری مثل سیم چین، هویه، مهارت لحیم کاری و مونتاژ یک برد برای راه اندازی رات نیاز است.
 |
 |
| کیت الکترونیک سطح 3 (سطح پیشرفته حداقل گروه سنی +10) | کیت الکترونیک سطح 2 (سطح مبتدی و متوسط حداقل گروه سنی +7) |
برای استفاده از این کیت آموزشی به چه لوازمی نیاز داریم؟
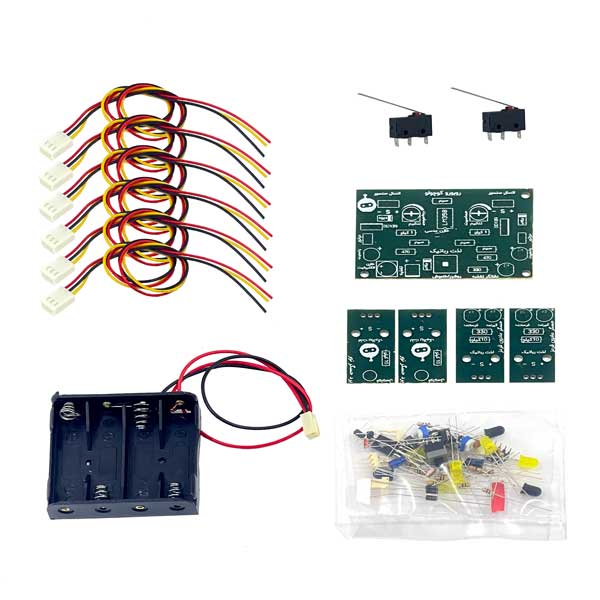
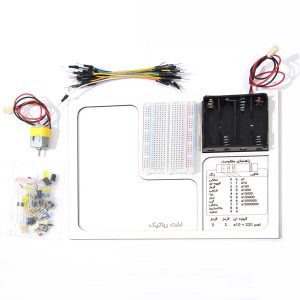
ابزار ساده مونتاژ از جمله سیم لحیم، روغن لحیم و یک هویه (از نوع 60 وات) و یک اشتیاق ساختن همه چیزهایی است که برای ساختن ربات نیاز است. در صورت نیاز به هر یک از لوازم زیر میتونید بر روی تصویر مورد نظر کلیک کنید.
 |
 |
 |
 |
| هویه | پایه هویه | سیم لحیم مرغوب | سیم چین |
اگر پرداخت آنلاین براتون سخته یا رمز پویاتون فعال نیست
از طریق روبیکا/شاد/ایتا و تلگرام (8009-277-0935) یا تماس 02191300089 سفارش دهید
طراحی و ساخت ربات حل ماز یا دوری از مانع
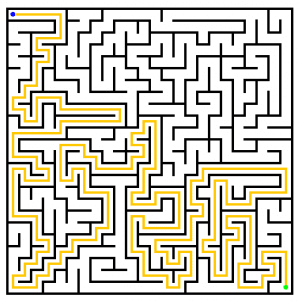
به تصویر زیر دقت کنید ، یک زمین مسابقه حل ماز حرفه ای است. همانطور که مشاهده میکنید زمین مسابقه دارای دیواره های بلند و به صورت پیچ در پیچ است که باید ربات راه خود را از نقطه شروع به پایان پیدا کند.

حتما این تصویر برای شما آشناست ، اگر اهل مطالعه مجالات سرگرمی باشید حتما به بازی موش پنیریاب یا مشابه آن برخورده اید . این بازی شامل یک صفحه پیچ در پیچ با بن بست های زیاد است که شما باید موش را از نقطه شروع به پنیر خود در نقطه پایان با انتخاب بهترین مسیر و خطکشی توسط خودکار برسانید.
ربات حل ماز نیز اینگونه عمل میکند ، در مسیر زمین حل ماز با استفاده از شاخک ها یا سنسورهای مخصوص مسیر خود را پیدا میکند.
ربات حل مازی که در این مقاله میسازیم از نوع بسیار ساده است که تنها یک سنسور برای سمت راست و یک سنسور برای سمت چپ خود دارد اما در مسابقات حرفه ای ربات های حل ماز دارای سنسورهای زیاد به خصوص از نوع غیر تماسی خواهند بود
در این ربات پیشنهاد میکنیم برای عملکرد بهتر ربات با استفاده از سیم مفتول یا هر چیز دیگر شاخک ها را برای حساسیت بیشتر بلند کنیم تا راحتتر به دیواره ها برخورد کند.
ربات حل ماز چگونه عمل میکند ؟

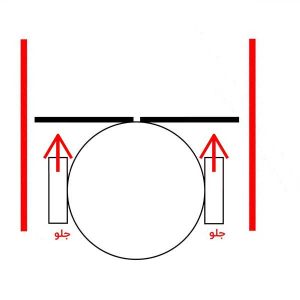
ربات حل ماز در حالت عادی به سمت جلو حرکت میکند. یعنی در حالتی که هیچ مانعی را در جلو خود حس نکند دو موتور به جلو میروند. با اصابت سنسور تماسی (میکروسوییچ اهرمی) به دیوار مسیر حالت خود را منحرف میکند.
|
مسیر ربات آزاد باشد
|
|
| موتور راست | موتور چپ |
| در حال حرکت | در حال حرکت |
| نتیجه » ربات رو به جلو میرود | |
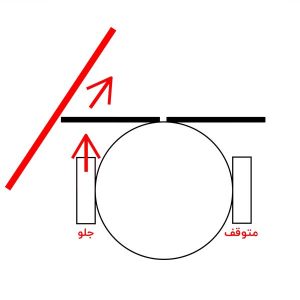
اگر ربات به دیواره چپ برخورد کند
در صورت برخورد ربات به دیوار از سمت چپ ربات ، باید به سمت راست بچرخد تا از دیوار دور شود. پس موتور سمت راست متوقف شده و موتور سمت چپ به حرکت خود ادامه میدهد و ربات به سمت راست خواهد رفت.
|
برخورد به دیوار سمت چپ
|
|
| موتور راست | موتور چپ |
| متوقف | در حال حرکت |
| نتیجه » گردش ربات به راست | |
اگر ربات به دیواره راست برخورد کند
و اگر به دیوار سمت راست برخورد کند ربات باید به سمت چپ رود تا از مانع دوری کند پس باید موتور سمت چپ متوقف شده و موتور سمت راست به حرکت خود ادامه دهد تا ربات به سمت چپ بچرخد.
برخورد به دیوار سمت راست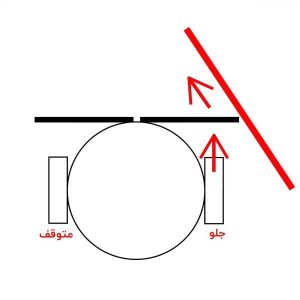 |
|
| موتور راست | موتور چپ |
| در حال حرکت | متوقف |
| نتیجه » گردش ربات به چپ | |
طراحی و ساخت ربات نوریاب یا دنبال کننده نور
خبر خوب اینجاست شما میتوانید هم ربات نوریاب بسازید هم نورگریز. ربات نوریاب در حالت عادی بدون حرکت است مگر آنکه با نور چراغ قوه تحریک شود. یعنی در حالتی که هیچ نوری حس نکند و نور عادی اتاق دو موتور خاموش است. در جداول زیر 4 حالت عملکرد ربات را بررسی میکنیم.
ربات نوریاب چگونه عمل میکند ؟
حالت سکون یا پارک
در این حالت ربات هیچگونه حرکتی ندارد . در تاریکی یا با تنظیم مناسب در نور عادی اتاق.
| نور عادی اتاق یا تاریکی مطلق | |
| موتور راست | موتور چپ |
| متوقف | متوقف |
| نتیجه » ربات در حالت سکون | |
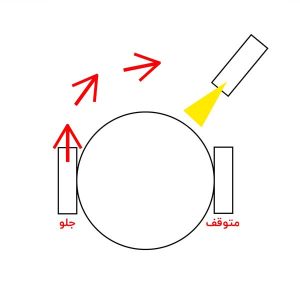
حالت هدایت ربات به راست
برای هدایت ربات به سمت راست باید به سنسور سمت راست نور بتابانید در این حالت با حرکت چرخ سمت چپ و سکون موتور راست ربات به سمت راست خواهد چرخید.
|
نور به سنسور سمت راست
|
|
| موتور راست | موتور چپ |
| متوقف | در حال حرکت |
| نتیجه » گردش ربات به راست | |
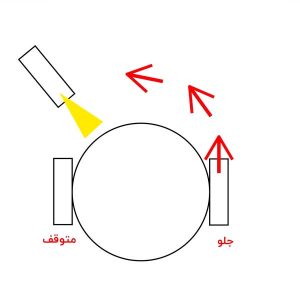
حالت هدایت ربات به چپ
برعکس حالت قبل برای هدایت به سمت چپ باید از طریق نور به بخش چپ ربات دستور چرخش به چپ را دهید. در این حالت باید موتور سمت راست حرکت کند و موتور چپ ساکن باشد تا ربات به سمت چپ هدایت شود.
|
نور به سنسور سمت چپ
|
|
| موتور راست | موتور چپ |
| در حال حرکت | متوقف |
| نتیجه » گردش ربات به چپ | |
حالت هدایت ربات رو به جلو
برای حرکت در مسیر مستقیم باید نور را به نحوی بتابانید که دو سنسور چپ و راست همزمان تحریک شوند.
| نور به سنسور به هر دو سنسور | |
| موتور راست | موتور چپ |
| در حال حرکت | در حال حرکت |
| نتیجه » حرکت رو به جلو | |
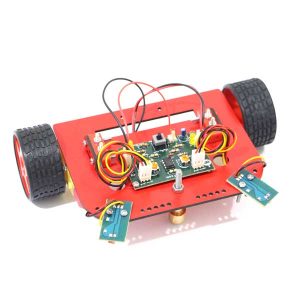
طراحی و ساخت ربات مسیریاب یا دنبال کننده خط
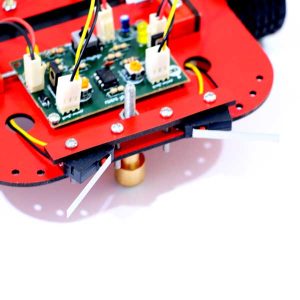
این ربات دارای دو سنسور فرستنده و گیرنده مادون قرمز است که یک خط مشکی را در پس زمینه سفید دنبال میکند. چگونگی عملکرد این سنسور و تشخیص رنگ مشکی از سفید را در بخش آشنایی با سنسورها توضیح خواهیم داد. ربات مسیریاب یک خط مشکی را که معمولا 1.5 تا 3 سانت عرض دارد را بر روی پس زمینه سفید دنبال میکند.
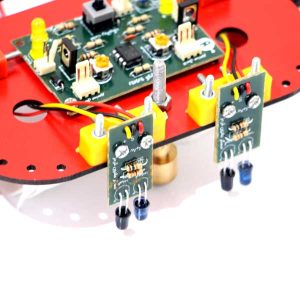
جنس این خط معمولا از لنت برق و زمینه مسابقه یک صفحه سفید است . زمین های مسابقه معمولا از جنس mdf میباشد اما شما در منزل هرجاکه سرامیک رنگ روشن دارید و یک نوار چسب برق (لنت مشکی) میتوانید یک مسیر مسابقه ربات مسیریاب را درست کنید.
ربات مسیریاب چگونه عمل میکند ؟
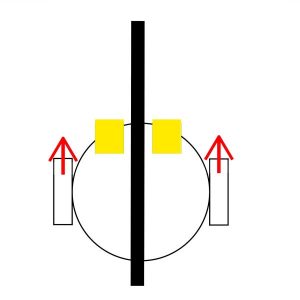
طبق تصویر زیر اگر خط مشکی مابین دو سنسور باشد و سنسورها بر روی سطح سفید قرار داشته باشند ربات به سمت مستقیم درحال حرکت خواهد بود.
|
خط مشکی مابین دو سنسور ( هر سنسور در پس زمینه سفید )
|
|
| موتور راست | موتور چپ |
| در حال حرکت | در حال حرکت |
| نتیجه » حرکت رو به جلو | |
طبق تصویر زیر در صورتی که خط مشکی بر زیر ماژول سمت راست قرار گیرد به این معنی است که ربات انحراف به چپ دارد و کم کم از سمت چپ از مسیر خارج میشود، پس باید ربات به سمت راست حرکت کند تا دوباره خط مابین دو سنسور قرار گیرد و ربات به جلو حرکت کند
سنسور سمت چپ روی زمینه سفید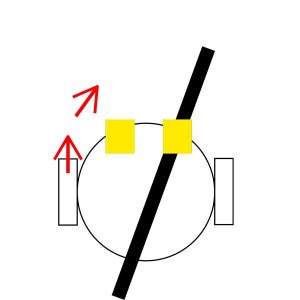 |
|
| موتور راست | موتور چپ |
| توقف | در حال حرکت |
| نتیجه » حرکت به سمت راست | |
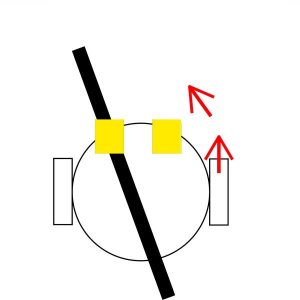
حال اگر سنسور سمت چپ بر روی خط مشکی قرار گیرد به این معنی است که ربات انحراف به راست دارد و در نزدیکی خارج شدن از مسیر بازی از ناحیه راست میباشد، پس باید کی به چپ به چرخد تا در مسیر عادی قرار گیرد.
|
سنسور سمت راست روی زمینه سفید
|
|
| موتور راست | موتور چپ |
| در حال حرکت | توقف |
| نتیجه » حرکت به سمت چپ | |
شناخت و عملکرد سنسورها
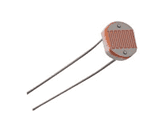
فوتوسل یا سنسور نور یک نوع مقاومت حساس به نور میباشد که با توجه به تاریکی یا روشنایی مقاومت آن تغییر میکند. به عبارتی یک نوع مقاومت متغیر است با این تفاوت که به صورت اتوماتیک مقاومت آن با توجه به نور تغییر میکند. از این خاصیت برای تشخیص روشنایی یا تاریکی به کمک مقایسه کننده ربات استفاده میکنیم. این قطعه همچون یک مقاومت عادی پایه مثبت و منفی ندارد و فرقی ندارد از چه جهت لحیم میکنید.
 |
 |
ربات نوریاب برای حرکت خود نیاز به راهنمایی شما از طریق نور چراغ قوه دارد. . انگار یک رباتی ساختید که دسته کنترل آن به صورت نوری عمل میکند.
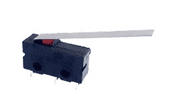
سنسور تماسی یا میکروسوییچ شاخکدار یک نوع کلید فشاری است به گونه ای که با فشرده شدن شاخک این قطعه میتوانیم برخورد ربات را به یک جسم خارجی تشخیص هیم. با این خاصیت یک ربات حل ماز یا دوری از مانع خواهیم ساخت به طوری که با شاخک های خود همچون حشرات راه خود را پیدا میکند.
این قطعه دارای 3 پایه میباشد که اگر دقت کنید با نام های C ( پایه مشترک بین دو پایه NC , NO میباشد) ، NC ( به معنی در حالت عادی بسته – یعنی در حالت عادی جریان از پایه C به این پایه متصل است و همچون یک سیم عمل میکند-) و NO ( به معنی در حالت عادی باز – همچون کلید عادی در حالت عادی متصل نیست و مسیر جریان قطع است بر خلاف پایه قبل-) میباشد .
 |
 |
عملکرد میکروییچ اهرمی به گونه است که در صورت فشرده شدن اهرم یا شاخک این قطعه ، دو پایه های NO , NC تغییر حالت میدهند . یعنی پایه در حالت عادی بسته(NC) که در حالت عادی (وقتی ک کلید یا سنسور تماس تحریک نشده است) به پایه مشترک C متصل است و جریان از C به NC برقرار است ، قطع میشود . در عوض جریان از پایه مشترک C به پایه NO راه میبابد. یعنی پایه در حالت عادی باز (NO) که در آن در حالت عادی جریانی برقرار نیست ، همچون کلید های عادی پس از فشرده شدن اهرم متصل میشود و جریان از آن عبور میکند.
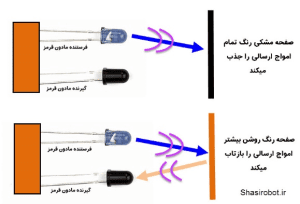
سنسورهای مادون قرمز فرستنده و گیرنده از نظر ظاهری همچون ال ای دی میباشند با این تفاوت که سنسور گیرنده به رنگ مشکی تیره است و سنسور فرستنده به رنگ آّبی شفاف یا بیرنگ میباشند. دلیل تیرگی رنگ گیرنده برای جذب کامل انعکاس نور مادون قرمز فرستنده است.
این دو سنسور در ماژول تعقیب خط به صورت جفت استفاده میشود. سنسور فرستنده وضیفه ارسال سیگنال به سطح سیقلی سفید را که پس زمینه زمین مسابقه است را دارد که در صورتی که سنسور فرستنده بر روی خط مشکی قرار داده باشد هیچ انعکاسی از نور تابیده شده به زمین به گیرنده نخواهد رسید و برعکس آن اگر فرستنده در سطح سفید قرار داشته باشد انعکاس نور ارسالی به گیرنده منعکس شده و با کمک مقایسه کننده ربات خط مشکی را از سطح سفید تشخیص میدهد.
 |
|







16دیدگاه